This thesis explores the development of a Mobile Automatic Under-Vehicle Inspection System (MAUVIS) to enhance security inspections, addressing the inefficiencies of traditional manual methods like handheld mirror UVIS which is widely used as it is cheap. By leveraging machine learning and remote control technologies, the research aims to improve the accuracy and speed of under-vehicle inspections in high-security environments.
The project seeks to provide a safer, more effective solution for identifying threats concealed in vehicle undercarriages, contributing to advancements in security technology and inspection processes.
Redesigning and developing MAUVIS for enhancing effectiveness and efficiency by eliminating manual methods.
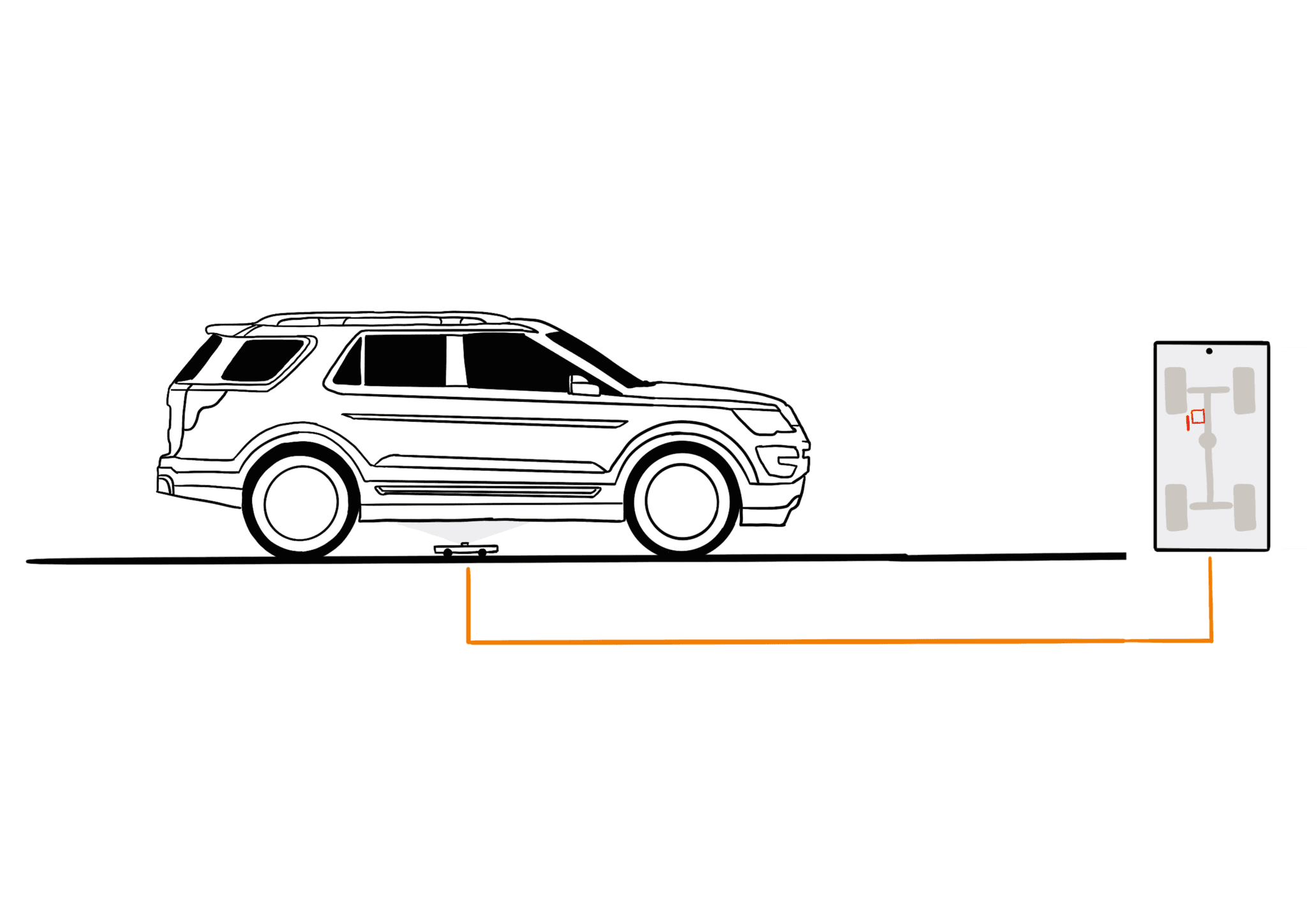
A working robot which can move around
A trained ML model which can detect foreign items under the chassis
An User Interface where user can control the robot and can see the results
July 2023- May 2024
Project Guide : Dr. Sougata Karmakar,
IIT Guwahati, India.
Student : Swati Saini, MDes'2024
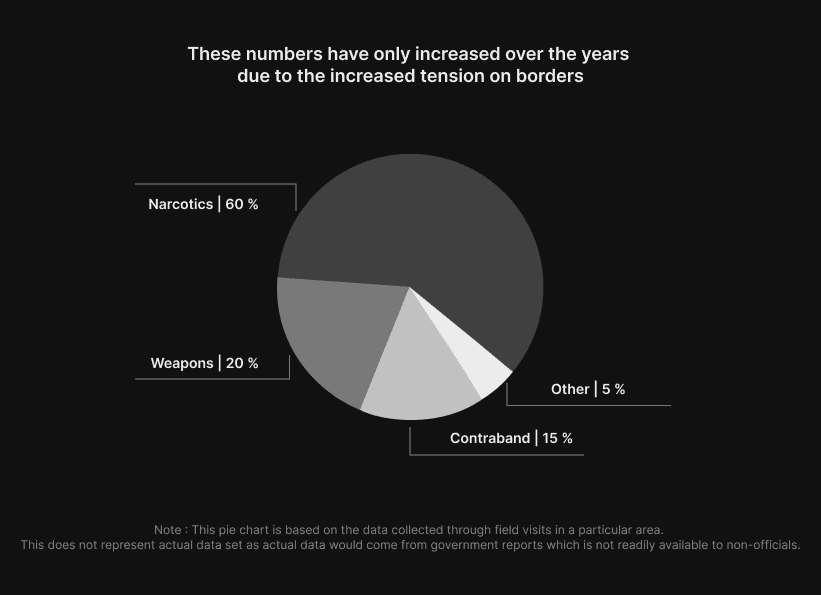
Under Vehicle Inspection Systems (UVIS) are tools used to scan the underside of vehicles. They are important for security, especially at places like border crossings, checkpoints, airports, and other high-security areas. The main goal of UVIS is to find and stop dangerous or illegal items, such as weapons, explosives, or drugs, that might be hidden under vehicles.


The Challenge
Kickoff
At the beginning of the project, I didn’t have a clear vision or set goals for what the new Under-Vehicle Inspection System (UVIS) should achieve. Lacking prior insights, I went for field visits and contextual inquiries to dig into how security personnel were conducting vehicle inspections and what challenges they faced.

Security Personnels didn't have clear idea how to use the device and what to look for.
Though they know how that works but only knew 1-2 things about how to operate.
The angle adjustment of the mirror is bit tricky that’s why they don’t even touch it.

It was heavy for them to carry device, takes more time, visibility is low and environment conditions make it harder to search.
The coverage given by mirror is partial and sometimes create congestion at the place.
